🤖 Roboflow Releases RF-DETR for Real-Time Detection
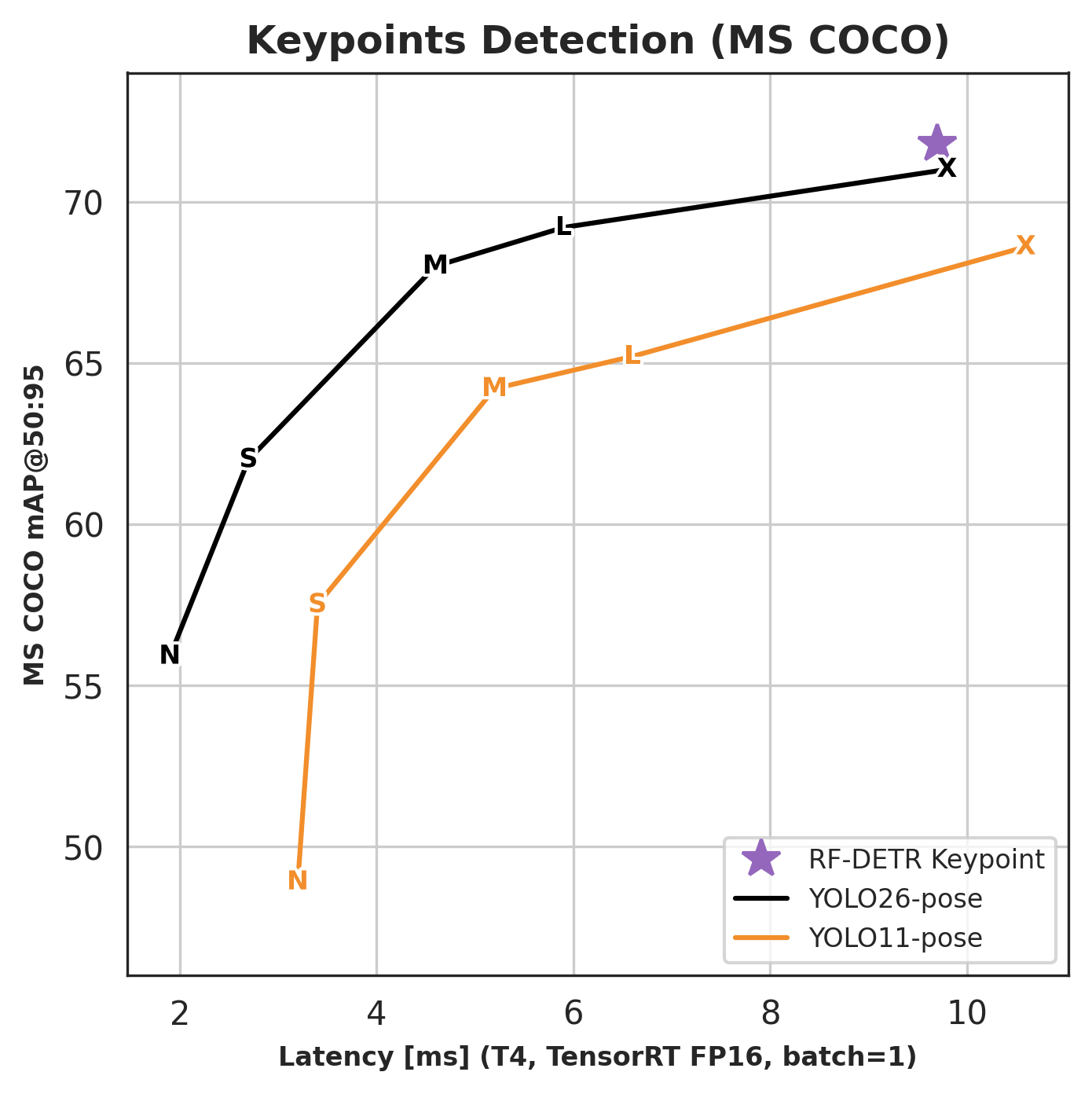
The company has introduced the RF-DETR transformer architecture, which unifies detection, segmentation, and keypoint detection (pose estimation) tasks. The DINOv2-based model demonstrates SOTA results: 71.8 AP on COCO with a latency of only 9.7 ms on an NVIDIA T4. A unique feature is the output of a 2D uncertainty ellipse for each keypoint.
🌍 RF-DETR sets a new efficiency standard for real-time computer vision systems, offering high accuracy with minimal latency, which is critical for robotics.
👤 You can use the rfdetr library for real-time pose tracking with accuracy previously only available to heavy offline models.
Source 1: https://github.com/roboflow/rf-detr Source 2: https://github.com/roboflow/rf-detr#keypoints